
|
При прохождении теста 1 в нем оказались вопросы, который во-первых в 1 лекции не рассматривались, во-вторых, оказалось, что вопрос был рассмаотрен в самостоятельно работе №2. Это значит, что их нужно выполнить перед прохождением теста? или это ошибка? |
Инспектор
Спонсор: Intel
Вы можете этот курс.
Опубликован: 20.08.2013 | Уровень: для всех | Доступ: платный | ВУЗ: Новосибирский Государственный Университет
Самостоятельная работа 2:
Базовые операции обработки изображений
2.7. Вычисление гистограмм
Один из наиболее распространенных дефектов фотографических, сканерных и телевизионных изображений – слабый контраст. Дефект во многом обусловлен ограниченностью диапазона воспроизводимых яркостей. Под контрастом понимается разность максимального и минимального значений яркости. Контрастность изображения можно повысить за счет изменения яркости каждого элемента изображения и увеличения диапазона яркостей. Существует несколько методов, основанных на вычислении гистограммы.
Допустим, что имеется изображение в оттенках серого, интенсивность пикселей которого изменяется в пределах значений от  до
до  , где
, где  и
и  . Для изображения можно построить гистограмму со столбцами, отвечающими количеству пикселей определенной интенсивности. Такого рода гистограмма позволяет представить распределение оттенков на изображении. В общем случае под гистограммой понимается коллекция целочисленных значений, каждое из которых определяет количество точек, обладающих некоторым свойством или принадлежащих определенному бину. На практике гистограммы применяются, чтобы получить статистическую картину о распределении каких-либо данных (пикселей, векторов признаков, направлений градиента во всех точках изображения и т.п.).
. Для изображения можно построить гистограмму со столбцами, отвечающими количеству пикселей определенной интенсивности. Такого рода гистограмма позволяет представить распределение оттенков на изображении. В общем случае под гистограммой понимается коллекция целочисленных значений, каждое из которых определяет количество точек, обладающих некоторым свойством или принадлежащих определенному бину. На практике гистограммы применяются, чтобы получить статистическую картину о распределении каких-либо данных (пикселей, векторов признаков, направлений градиента во всех точках изображения и т.п.).
В данном разделе остановимся на рассмотрении структур данных и функций OpenCV, обеспечивающих вычисление гистограмм. Ниже приведены прототипы доступных функций.
void calcHist(const Mat* arrays, int narrays,
const int* channels, const Mat& mask,
MatND& hist, int dims, const int* histSize,
const float** ranges, bool uniform=true,
bool accumulate=false)
void calcHist(const Mat* arrays, int narrays,
const int* channels, const Mat& mask,
SparseMat& hist, int dims,
const int* histSize, const float** ranges,
bool uniform=true, bool accumulate=false)
Параметры:
- arrays – исходные массивы данных или изображения. Должны иметь одинаковую глубину (CV_8U или CV_32F) и размер.
- narrays – количество исходных массивов данных.
- channels – массив индексов каналов в каждом входном массиве, по которым будет вычисляться гистограмма.
- mask – маска, на которой считается гистограмма. Опциональный параметр. Если маска не пуста, то она представляется 8-битной матрицей того же размера, что и каждый исходный массив. При построении гистограммы учитываются только элементы массивов, которые соответствуют ненулевым элементам маски. Если маска пуста, то построение гистограммы выполняется на полном наборе данных.
- hist – результирующая гистограмма, плотная в случае использования первого прототипа функции, разреженная – в случае второго. Для хранения плотной гистограммы используется структура данных MatND, для разреженной – SparseMat. MatND представляется в виде n-мерного массива, SparseMat – хэш-таблицей ненулевых значений [10].
- dims – размерность гистограммы. Параметр принимает положительные целочисленные значения, не превышающие CV_MAX_DIMS = 32.
- histSize – количество бинов по каждой размерности гистограммы.
- ranges – интервалы изменения значений по каждой размерности гистограммы. Если гистограмма равномерная (uniform = true), то для любой размерности i достаточно указать только нижнюю границу изменения (по существу значение, соответствующее первому бину), верхняя граница будет совпадать с histSize[i]-1.
- uniform – флаг, который определяет тип диаграммы (равномерная или нет).
- accumulate – флаг, указывающий на необходимость очищения гистограммы перед непосредственными вычислениями. Использование данного флага позволяет использовать одну и ту же гистограмму для нескольких множеств массивов или обновлять гистограмму во времени.
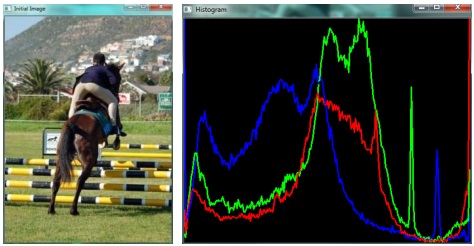
Рассмотрим пример программы, которая осуществляет построение и отображение гистограмм по каждому каналу цветного изображения. Программа получает в качестве аргументов командной строки название изображения, расщепляет полученную матрицу по каналам (split) и вычисляет гистограмму для каждого канала изображения (calcHist). Заметим, что в OpenCV каналы изображения хранятся в порядке BGR, а не в RGB. Далее выполняется нормализация гистограмм (normalize) для приемлемого отображения в виде ломаных.
#include <stdio.h>
#include <opencv2/opencv.hpp>
using namespace cv;
const char helper[] =
"Sample_calcHist.exe <img_file>\n\
\t<img_file> - image file name\n";
int main(int argc, char* argv[])
{
const char *initialWinName = "Initial Image",
*histWinName = "Histogram";
Mat img, bgrChannels[3], bHist, gHist, rHist, histImg;
int kBins = 256; // количество бинов гистограммы
// интервал изменения значений бинов
float range[] = {0.0f, 256.0f};
const float* histRange = { range };
// равномерное распределение интервала по бинам
bool uniform = true;
// запрет очищения перед вычислением гистограммы
bool accumulate = false;
// размеры для отображения гистограммы
int histWidth = 512, histHeight = 400;
// количество пикселей на бин
int binWidth = cvRound((double)histWidth / kBins);
int i, kChannels = 3;
Scalar colors[] = {Scalar(255, 0, 0),
Scalar(0, 255, 0), Scalar(0, 0, 255)};
if (argc < 2)
{
printf("%s", helper);
return 1;
}
// загрузка изображения
img = imread(argv[1], 1);
// выделение каналов изображения
split(img, bgrChannels);
// вычисление гистограммы для каждого канала
calcHist("bgrChannels[0], 1, 0, Mat(), bHist, 1,
"kBins, "histRange, uniform, accumulate);
calcHist("bgrChannels[1], 1, 0, Mat(), gHist, 1,
"kBins, "histRange, uniform, accumulate);
calcHist("bgrChannels[2], 1, 0, Mat(), rHist, 1,
"kBins, "histRange, uniform, accumulate);
// построение гистограммы
histImg = Mat(histHeight, histWidth, CV_8UC3,
Scalar(0, 0, 0));
// нормализация гистограмм в соответствии с размерам
// окна для отображения
normalize(bHist, bHist, 0, histImg.rows,
NORM_MINMAX, -1, Mat());
normalize(gHist, gHist, 0, histImg.rows,
NORM_MINMAX, -1, Mat());
normalize(rHist, rHist, 0, histImg.rows,
NORM_MINMAX, -1, Mat());
// отрисовка ломаных
for (i = 1; i < kBins; i++)
{
line(histImg, Point(binWidth * (i-1),
histHeight-cvRound(bHist.at<float>(i-1))) ,
Point(binWidth * i,
histHeight-cvRound(bHist.at<float>(i)) ),
colors[0], 2, 8, 0);
line(histImg, Point(binWidth * (i-1),
histHeight-cvRound(gHist.at<float>(i-1))) ,
Point(binWidth * i,
histHeight-cvRound(gHist.at<float>(i)) ),
colors[1], 2, 8, 0);
line(histImg, Point(binWidth * (i-1),
histHeight-cvRound(rHist.at<float>(i-1))) ,
Point(binWidth * i,
histHeight-cvRound(rHist.at<float>(i)) ),
colors[2], 2, 8, 0);
}
// отображение исходного изображения и гистограмм
namedWindow(initialWinName, CV_WINDOW_AUTOSIZE);
namedWindow(histWinName, CV_WINDOW_AUTOSIZE);
imshow(initialWinName, img);
imshow(histWinName, histImg);
waitKey();
// закрытие окон
destroyAllWindows();
// осовобождение памяти
img.release();
for (i = 0; i < kChannels; i++)
{
bgrChannels[i].release();
}
bHist.release();
gHist.release();
rHist.release();
histImg.release();
return 0;
}
Результат запуска программы на тестовом изображении из набора PASCAL VOC 2007 показан на рисунке (рис. 7.10) ниже.
Александра Максимова
Алена Борисова
|
В лекции по обработке полутоновых изображений (http://www.intuit.ru/studies/courses/10621/1105/lecture/17979?page=2) увидела следующий фильтр:
В описании говорится, что он "делает изображение более чётким, потому что, как видно из конструкции фильтра, в однородных частях изображение не изменяется, а в местах изменения яркости это изменение усиливается". Что вижу я в конструкции фильтра (скорее всего ошибочно): F(x, y) = 2 * I(x, y) - 1/9 I(x, y) = 17/9 * I(x, y), где F(x, y) - яркость отфильтрованного пикселя, а I(x, y) - яркость исходного пикселя с координатами (x, y). Что означает обычное повышение яркости изображения, при этом без учета соседних пикселей (так как их множители равны 0). Объясните, пожалуйста, как данный фильтр может повышать четкость изображения? |
